Whose hands are biggest? You may be surprised.
A recent project to create an ergonomic handle for 3D printing led me down a path that introduced me to anthropometric measurements of the human hand, which in turn revealed some interesting facts about hand sizes. I had no idea that hand size is dependent on nationality, but I found a number of research articles on this topic.
For those who don't want to read further, the answer to the title question is: Based on the data found, Filipino males have the biggest hands, by a significant margin. In fact, the margin is large enough that this population may be considered an outlier from the general human population with respect to hand size. Even Filipina females have larger hands than most males of other nationalities. On the other end of the spectrum, Vietnamese females and Indian females have the smallest hands.
Now you can read on for the whole story, or you can skip down to the chart at the end.
Idea for a toy
My unintentional investigation into hand sizes started while designing an over-engineered pull-copter, a toy with a handle that contains a spindle atop a gear spun by a toothed pull-cord, and the spindle drives a propeller, which launches into the air. I decided it would be fun to over-engineer it. The propeller wouldn't have just basic flat blades, but real NACA airfoil blades twisted for true-pitch and swept to reduce drag, plus an inertial ring that also has a NACA airfoil cross section. The pull-cord and drive gear wouldn't have crude V-shaped gear teeth, but would have teeth created by a tooth-cutting technique similar to how real gear teeth are made, with the teeth having a rounded shape for optimal 3D printing and a tilted, sawtooth-like profile for increased strength in a single force direction. And finally, the handle wouldn't be simply a rod or stick, but it would be ergonomically designed from anthropometric measurements, to equalize as much as possible the contact pressure on the hand.
This story starts with the handle, diverges into an analysis of human populations by nationality, and ends with an improved handle.
First try
The only research I could find about actual ergonomic handle dimensions was a 2020 paper by Ching-Yi Wang and Deng‐Chuan Cai from Asia University in Taiwan. The researchers used a contour gauge to measure grip profiles of 60 participants (half male, half female) from which they derived curve parameters for the front, back, and sides of an ergonomic handle.
![[Ergonomic handle dimension properties]](https://blogger.googleusercontent.com/img/a/AVvXsEhludIykX9vgF4_DphbH7FCTmakTSYysatMWn5e-UJqa1PGLP5Qp-9kvhwwmJSFO70o7aOf32dMg4SXpmDj14YFJf7Zh0cQr61tYdnDyZFcRwihhL3wIDwUBci-PvlGIN_5fP01828u8vrVLrOnT0ZJZMatxgoKy4I57ZyugIsGgeIuHBSeifftOUuT=s600)
Dimensional properties of an ergonomic handle used in Wang and Cai's research study. Reproduced with permission; see citation [1].
I took the coordinates of the control points for each of these curves and used Polysolve to derive coefficients for polynomials to match the control points perfectly, for each of the three handle sizes presented in the study. The small, medium, and large handles corresponded to 5-30 percentile, 30-75 percentile, and 75-95 percentile hand sizes, respectively. The front profile curve is a second-degree polynomial (a parabola) because it has three control points. The rear and side curves have five control points each, so they are fourth-degree polynomials. A horizontal cross-section of the handle at any elevation is always an ellipse with eccentricity determined by the polynomials' displacements from a centerline angled 110°.
I then spent many hours creating a model of the handle in OpenSCAD using these polynomials to define a stack of horizontal elliptical cross-sections distributed in elevation along the handle length. The front and back polynomials determine the major axis of each elliptical cross section, and the side polynomial determine the minor axis.
I was quite pleased when the model in the CAD program looked just like the figures in the paper:
![[CAD renderings of handles]](https://blogger.googleusercontent.com/img/a/AVvXsEjkaGDz6D9ahj2ScSZyz6NMTwiCnQGP_oZrSTTsJhU4B86fMe8FdhsRgqU3-ednZW-97reucn3zma9mD9BNtisdDNSIiEFZxQabwoTMkDB2n4VAvkTWqnWjBO6hJvh5wrMqIgg1iwx3fR6SExOTAkeFGeveLoNhRiZRTNCqjbnDCWIqICJh8cIYWCB5=s320)
Basic average-size handle as defined in the referenced study, and the same thing with a bottom end cap and grip grooves, which was 3D-printed.
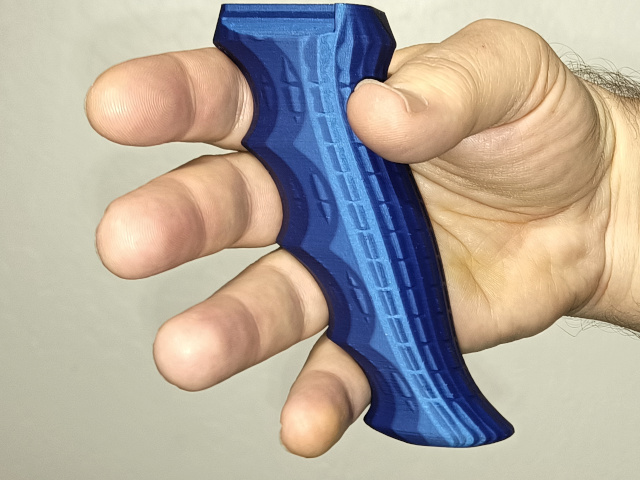
Using the coefficients I derived for the average-size hand in the paper, I designed a pull-copter gearbox attachment for the top of the handle, and printed this handle on my 3D printer. When it was done, I immediately noticed it was too small for my hand, even though it matched the measurements given.
![[handle too small for me]](https://blogger.googleusercontent.com/img/a/AVvXsEiOonCWtu1tzYFF9bEK1CedZKOnExnUW-qZwE9V4kHYKOJXQ0CRDYCXl-hSGV4lCkTK4swqpXWD5Zy432xxN0GEjUAsVQ20EENaqnTtE0FyqXdiwW5kecd3H3A0YL-BdOGJokWm_XZpSgYOjtnowT-Ct3bWUJtYHPfDJ-Zw6diTcQdtT2sCHXcGuq6G)
Too small for me! The bottom of the handle should extend slightly past my palm. The part poking out of the top of my hand is a structure intended for attaching another part.
I am not a large man. I am smaller than average, as are my hands. This handle fit my 12-year-old son quite well, but not me.
What went wrong?
Reading through the paper again, I realized that the researchers did not separate their measurements by gender. It is well-known that males have larger hands than females, but in this handle design, both males and females in the study were treated as a single group. I suspect that grouping both genders into a single population results in bimodal distributions for hand lengths and hand widths.
That means the "average" handle I printed is smaller than an average male hand, and larger than an average female hand.
I am reminded of the time when my sister and her husband, both avid equestrians, contracted a saddle fitter to create a custom saddle. My sister is a short woman and her husband is a tall man. After the saddle fitter carefully measured my sister and her husband, they told him to make a saddle based on the average of their measurements! He did so — but of course they ended up with a saddle that was too big for her and too small for him.
That's the situation here. The researchers did provide percentile groupings for small, medium, and large hands. One could safely assume that the 75-95 percentile group includes mostly male test subjects and the 5-30 percentile group includes mostly females, but I am skeptical that the middle measurements fit the average of either gender.
Discovery of another problem
![[hand length and width]](https://blogger.googleusercontent.com/img/a/AVvXsEi-vK55Q-EGpBn_X7tyqjpgn_raL5AzedaNaBRM0AHcy3DDrCQ9UPdpTLh_bdeuJycfqs7HbPaovHiHgqka0pP_5hR9o5Wv8-ncWsw0K0fO-9ah3ZJ4Nl5G6ja51-czCqTKisKPpIyQ5LwwdLWedue_5TSd01mdVPzt4-xPOpsG4aidxkEGd7ktZb1K=s400)
I noticed something else: Metacarpal breadth isn't constant. It changes as fingers bend. I haven't seen any literature about this. I cannot believe I'm alone in this discovery, but still, as I said, I couldn't find anything written about it.
The ergonomic handle dimensions are based on two primary measurements:
- Hand length is defined as the distance from the tip of the middle finger to the first crease at the wrist. This determines the thickness of the handle. All of the handle's horizontal dimensions are proportional to this.
- Metacarpal breadth, also referred to as hand width or four-finger width, is defined as the distance measured from the base of the index finger to the base of the pinky finger, measured from each edge of the hand at the crease where the fingers join the palm, with the four fingers extended straight out and touching. This measurement determines the length (height) of the handle.
I observed that the metacarpal breadth expands when the hand grips something. Or even when making a loose fist without gripping anything. I measured this expansion on my own hand, and the hands of my family, and called my father to do the same. The metacarpal width expands about 9% to 15% of the width measured when the hand is held out flat.
Second try
Clearly, adjustments were needed.
For one thing, I had to do away with the predefined small, medium, and large sizes, and create a handle that is sized parametrically according to the length and width of an actual hand.
Using the measurements from the whole data set, I scaled all the curve control points to a tiny hand 1 millimeter long and 1 millimeter wide, with the horizontal displacements scaled by hand length and the vertical displacements scaled by hand width. Then I calculated new polynomial coefficients, which result in handle for a 1×1 millimeter hand. A handle of the proper size is then obtained simply by multiplying the horizontal dimensions by measured hand length and the vertical dimensions by measured hand width.
In addition, to account for the metacarpal breadth expansion when grasping the handle, the handle length gets scaled 12% bigger than the measured hand width.
Final tweak: flairing the front
![[comparison of control points]](https://blogger.googleusercontent.com/img/a/AVvXsEhKjQukozFzpU8OzMm6BST8OueQgJbIJ85J75Xe1dC-C392_9HGYZhaD6uzG5AJ18TdnJ5S3G6-D81wLk-gwVFhBaoNhVYEvzA-6tgFQDrl6DQ2-ePBEGfrNxJaOZd-vVQSpHTWmncS6HKwVeKtcjVN-M3LyClx1-C3UnBqUyiGafWOd4TSNxd-aPY2=s400)
Left: Original handle showing control points for degree-2 polynomial of the front (left) curve. Right: Handle with the outer control points replaced, resulting in a slightly flaired front curve using a degree-4 polynomial. The two inner control points are taken from the original degree-2 polynomial in the same locations and duplicated on the ends, parallel with the centerline.
The handle in the research paper was designed to distribute hand contact pressure when pushing on the handle. When pulling on it, or simply holding it, it's comfortable enough, but I was bothered by the parabolic front profile allowing the pinky finger to slip off in pulling situations. The back and side profiles naturally include a flaired lip at the top and bottom of the handle, but the front profile doesn't. I wanted to create a slight flair on the front also, for more stability on the pinky when the handle experiences pulling or even torsional loads.
This was simple. Because I had expanded the length by 12% to accommodate metacarpal breadth expansion, I simply found new control points on the original parabola 6% inward from the ends, and duplicated these on the ends. This mostly preserves the original curve everywhere except near 6% from the ends, and changes the polynomial from second-degree to fourth-degree, like the other profiles. This provides a flair to the front curve at the top and bottom. The majority of the new curve matches the original curve, although the top and bottom of the handle are now slightly larger than the original. The flair is subtle but I'm satisfied with it. I don't want to change the front profile too much. After all, it is intended to match the natural curve of the four bent fingers.
Handle calculations
Here are the polynomial coefficents for both kinds of handle, the original without the front-curve flair, and my new design with the flair.
| Coefficient: | a0 | a1 | a2 | a3 | a4 |
|---|---|---|---|---|---|
| Original front curve | 0.10821 | 0.078072 | -0.11714 | 0 | 0 |
| Front curve, flaired + 12% metacarpal expansion | 0.11247 | -0.018795 | 0.36188 | -0.83804 | 0.46058 |
| Side curves | 0.089095 | -0.23995 | 1.09341 | -1.59021 | 0.70892 |
| Rear curve | 0.10821 | -0.46857 | 1.92724 | -2.96297 | 1.49953 |
These polynomial coefficients are for a tiny hand 1 mm in length and 1 mm in width, with the origin at the center of the top of the handle.
For the full-size handle, start with the measurements of hand length L and expanded metacarpal breadth B. For this design we assume that the metacarpal breadth expands by 12%, so we multiply the measurement by 1.12 to get the expanded breadth B.
To calculate a horizontal elliptical cross-section of the handle at any positive elevation 0 ≤ z ≤ B below the top of the handle, we need the displacement d from the centerline as a function of positive elevation on the tiny 1×1 mm handle using the polynomial coefficients above. This tiny-handle elevation, w, is a value between zero and 1, corresponding to z elevations ranging from zero (top of handle) to B. After plugging w into the polynomials for each curve, multiply the result by the hand length L to get displacement d from the handle centerline.
$$\begin{array}{rcl} L & = & \mathsf{measured\ hand\ length}\\ B & = & \mathsf{measured\ metacarpal\ breadth} \times 1.12\\ w & = & \frac{z}{B}, \quad 0 \le z \le B\\ d & = & L \times (a_0 + a_1 w + a_2 w^2 + a_3 w^3 + a_4 w^4), \quad 0 \le w \le 1 \\ \end{array}$$The displacement from the centerline is always positive. Therefore, the front curve values should be negated to place it opposite the centerline from the rear curve. Two side curves must be generated with opposite signs to place them on opposite sides of the centerline. At any elevation z, the difference between the front and rear curves define the long axis of the handle's elliptical cross-section, and the distance between the two side curves define the short axis.
An ellipse cross-section defined by 64 vertices, with 64 cross-sections along the length of the handle, results in a sufficiently smooth handle.
So, what should be the "default" size?
Once I completed designing the handle, I had to answer the question of default parametric settings. OpenSCAD uses a script language (SCAD is an acronym for scripted computer aided design) to make parametric designs that would be difficult in other CAD programs. The input parameters need default values. When the ergonomic_handle() module is called without any parameters at all, it should generate a reasonable handle that would be satisfactory for most people.
The primary inputs are the length and width of a hand. If you give the module a larger length, you get a thicker handle. Give it a larger width, and you get a longer handle. The research paper that presented this handle used 60 Taiwanese participants for the measurements, and I wondered if their hands represented a more diverse population. Indeed, during my searches I came across studies about anthropometric differences by nationality, so I decided to look for similar studies.
Here is what I found. I took the mean hand length and metacarpal breadth from each source, and calculated the hand "area" (length × width) to get a single number to plot the sizes in ranked order.
| Nationality | Source | Males | Females | Notes | ||||
|---|---|---|---|---|---|---|---|---|
| Hand length | Metacarpal width | Hand area | Hand length | Metacarpal width | Hand area | |||
| Bangladeshi | [2] | 173.2 | 79.4 | 13746 | 167.6 | 74.1 | 12425 | |
| Central Indian | [2] | 181.0 | 83.0 | 15023 | 169.6 | 68.0 | 11533 | |
| Czech | [6] | 192.0 | 89.0 | 17088 | 175.0 | 79.0 | 13825 | |
| East Indian | [2] | 175.1 | 82.3 | 14411 | 160.9 | 73.0 | 11746 | |
| Filipino | [6] | 197.5 | 98.0 | 19355 | 179.5 | 92.3 | 16568 | |
| German | [6] | 189.0 | 87.0 | 16443 | 177.0 | 77.0 | 13629 | |
| Iranian | [3] | 193.2 | 86.9 | 16790 | - | - | - | No data for females |
| Jordanian | [2] | 191.2 | 87.7 | 16768 | 171.2 | 77.8 | 13323 | |
| Korean | [4] | 183.3 | 86.0 | 15755 | 170.7 | 78.0 | 13322 | |
| Mexican | [2] | 185.5 | 85.3 | 15823 | 171.8 | 77.0 | 13229 | |
| Slovak | [7] | 188.2 | 85.0 | 15898 | 172.1 | 75.9 | 13054 | |
| Taiwanese | [1] | 183.6 | 81.9 | 15037 | 171.7 | 76.6 | 13152 | Assumed 5-30 percentile are female, 75-95 percentile are male |
| Turkish | [6] | 190.4 | 87.3 | 16622 | 172.2 | 76.1 | 13104 | |
| Turkish dentistry | [5] | 190.9 | 74.2 | 14160 | 172.5 | 69.3 | 11953 | Survey of Turkish dentistry students. Conflict in hand breadth with other Turkish source. |
| Vietnamese | [2] | 177.0 | 79.2 | 14018 | 160.5 | 71.0 | 11396 | |
| Average | 186.0 | 84.8 | 15744 | 170.9 | 76.1 | 13001 | Average area is calculated from average length × average width, not the average of all the areas. | |
| Minimum | 173.2 | 74.2 | 13746 | 160.5 | 68.0 | 11396 | ||
| Maximum | 197.5 | 98.0 | 19355 | 179.5 | 92.3 | 16568 | ||
Here is all of that data plotted in sorted order:

Filipino males have unusually large hands! And Filipina females have larger hands than most males of other nationalities.
If you squint at that chart, you can see that there are three distinct groupings (excluding Filipino males). There is clearly a "small hand" group and a "large hand" group, about 20% of the list on each end.
A simple average (not weighted for world population of each nationality) suggests that the average male hand is 186 mm long and 85 mm wide, almost the same as the average Korean, Mexican, or Slovak hand, and close to the size of a German hand. The average female hand is 171 mm long and 76 mm wide, approximately the size of an average Slovak, Turkish, or Taiwanese female hand.
Here's how it turned out
As for defaults in my ergonomic handle model, I may as well use the average male hand, 186 mm × 85 mm. That would be large enough for most of the world's population. Anyone can override the defaults anyway.
And here it is, shown side by side with the original "average" size that was too small for me. The larger one is printed using the average male hand dimensions 186 mm × 85 mm, with a 12% increase in length to account for metacarpal breadth expansion, and a slight flair of the front profile at the top and bottom.

They fit my 12-year-old son and me quite well.

Additional data (2 years later)
Over two years after I published the data above, I came across two additional sources of hand data. They didn't have a breakdown across nationalities, but the measurements can be considered representative of the United States, because one source is from the University of Maryland in College Park, and the other source is from NASA. Unlike many other countries with a more homogenous ethnic population, the United States is rather mixed, so one would expect a wide variation of measurements although it is likely the test subjects were primarily of Euopean descent.
| Population | Source | Hand length | Metacarpal width | Hand area | Notes |
|---|---|---|---|---|---|
| Male+female adults | U. Maryland[8] | 189 | 81 | 15309 | Data not separated by gender. |
| 50th percentile American male | NASA[9] | 193 | 89 | 17177 | 5%-95% range 179-206 (length), 82-96 (width). |
| 50th percentile American female | NASA[9] | 172 | 78 | 13416 | 5%-95% range 158-187 (length), 69-78 (width). |
The University of Maryland data shows a hand size about 1/3 of the way down from the top of the graph shown previously, between Taiwanese and Korean males. This seems consistent with mashing together two separate populations, males and females, to arrive at one size measurement that is representative of neither. The NASA data confirms that in reality, American male hands are bigger than this and American female hands are smaller than this.
According to the NASA data, the median American male hand is on the large side of the range, comparable with male Czech hands in the previous table, and the median American female hand is comparable with Jordanian females, on the larger size end of the female population.Addendum: Finger grooves for pulling loads
A few weeks after publishing this document, and after printing a number of these handles for my pull-copter design, someone mentioned adapting this handle to use as a carrying handle for heavy bags. So I started thinking about improving it for pullling loads. The handle in the article by Wang and Cai was intended for pushing loads. Above, I described a little modification to flair the front profile above to make it better for pulling. However, that modification by itself doesn't really do the same job as the rear profile: distribute contact pressure evenly across the hand. The forward profile should do the same for the fingers under pulling loads.
So I decided to add finger grooves.
Two of the studies I found (Mirmohammadi et al about Iranian male hands, and Çakıt et al about Turkish dentistry student hands) included width measurements for the fingers. After converting the four finger widths to proportion of metacarpal breadth, I realized I couldn't model the finger grooves as semicircles without getting sharp corners at the finger boundaries. I eventually decided to use a trochoid, which is a curve traced by by a point some distance b from the center of a disk of radius r as the disk rolls. Both the x and coordinates are expressed parametrically as functions of the disk's rotation angle θ like this:
$$ x = r\theta - b \sin \theta $$ $$ y = r - b \cos \theta $$Interestingly, it is not possible to express y as a function of x in a closed form. It must be calculated numerically.
If b < r, the point tracing the curve lies inside the circle of the disk, and it draws a nice curve with little rounded points:![[Trochoid curve]](https://upload.wikimedia.org/wikipedia/commons/1/1c/TrohoidH0%2C8.gif)
The trochoid traced when b = 0.8r.
I want to turn this upside-down, so the cusps are pointing upward, and the rounded part always rests on the x axis. Subtracting y equation from r and then adding back the offset b, then scaling it by some factor, y becomes:
$$ g(z) = y = a (b + b \cos \theta) $$ $$ g(z) = a b (1 + \cos \theta) $$where for our finger grooves:
- \(g(z)\) is the groove profile offset at handle elevation \(z\)
- \(a\) is an amplitude factor (I settled on 1.1)
- \(b = 0.65 r\) in which \(r = \frac{\mathsf{FingerWidth}}{2\pi} \)
The scaling factor (a = 1.1) controls the overall depth of the grooves. Notice that the radius term is gone, leaving only a cosine wave scaled by b, which is already some fraction of the radius (I chose b = 0.65r). It becomes simple, then, to correct for the fact that each finger has a different trochoid that causes discontinuities where they meet. To solve that problem, simply interpolate b linearly along each trochoid, so that when one cycle completes, b has the correct value for the next cycle.
Armed with the fraction of metacarpal breadth for each finger, calculating b = 0.65rn for each finger n (where n = 1, 2, 3, 4), interpolating b along each finger width so the trochoids line up, and scaling by 1.1, the grooves for four fingers look like this:
![[Trochoid finger groove profile]](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhWHdgUGpUJcrSUYFrObHkgbBczLmL9qeOaB4ItO0t-MnQIUqY3oJiBFiBjAmIrANeYwkJ9hW-MRZmVA50L5iyLam9lKH0wFs1am7WEI_xO_JB7r9pBy16N_fT-wpDUKb9T3KAt95AfbsYLTecEALfb627OBozjXEf19dtBVy-5Ln9CNID3X434yW0Z/s600/trochoid1.png)
And then, to make the grooves on the handle, the semimajor axis for the forward half of each elliptical cross-section is elongated by the groove offset g(z) for each handle elevation z.
Unfortunately, the resulting finger grooves didn't turn out well.
The grooves fit my fingers at their bases.

The grooves are reasonably comfortable on the fingertips.

But when grasping the handle, the cusps poked uncomfortably into my flesh.
What went wrong?
I didn't account for the fact that my thumb also occupies space on the handle. In fact, the thumb and index finger account for about 40% of the handle length! When I wrap my hand around the handle, the fingers are all pushed toward the pinky finger at the bottom of the handle, causing uncomfortable misalignment between the fingers and the handle's grooves.
Going back to the anthropometric data in the two studies I mentioned previously, I calculated new proportions of handle width for each of the five digits of the hand instead of just the four fingers. I combined the thumb and index finger, and split the difference, to give the index finger a little bit more space. The thumb value doesn't have its own groove, but instead provides an offset for the index finger groove position. Here are the proportions I used:
| Thumb: | 21.63% |
| Index finger: | 21.62% |
| Middle finger: | 20.12% |
| Ring finger: | 19.35% |
| Pinky finger: | 17.28% |
And here is how it came out. The original handle is shown next to the same one with finger grooves added.

Ideally, the groove separators should be sticking out perpendicular from the front profile of the handle, instead of sticking out directly forward, but it was easier simply to elongate the elliptical cross sections according to the groove profile. Nevertheless, this correction worked well, as shown below.

My fingers fit right into the grooves!
The grooved handle has a disadvantage, however. It fits only the hand for which it was designed. If the grooved handle is not sized properly for the hand, it is uncomfortable, and therefore not ergonomic. The non-grooved handle is better for general use because it can be held comfortably by a broader range of hand sizes. A small hand can easily grasp a too-large handle, but cannot easily grasp a too-large grooved handle without discomfort.
Where to find this design
My OpenSCAD model for this handle design is availble on Thingiverse and on Printables.
References
- a↵b↵ Wang, Ching-Yi; Cai, Deng-Chuan (2020). "Hand tool handle size and shape determination based on hand measurements using a contour gauge". Human Factors and Ergonomics in Manufacturing & Service Industries. 30: 349–364. doi: 10.1002/hfm.20846. Full text is available on ResearchGate.
- ↵ Imrhan, Sheik N; Sarder, MD; Mandahawi, Nabeel (2009). "Hand anthropometry in Bangladeshis living in America and comparisons with other populations". Ergonomics. 52(8): 987–998. doi: 10.1080/00140130902792478
- a↵b↵ Seyyed Jalil Mirmohammadi, Amir Houshang Mehrparvar, Mehrdad Mostaghaci, Mohammad Hossein Davari, Maryam Bahaloo, Samaneh Mashtizadeh (2016). "Anthropometric hand dimensions in a population of Iranian male workers in 2012". International Journal of Occupational Safety and Ergonomics 22(1): 125-130. doi: 10.1080/10803548.2015.1112108
- ↵ Soo-chan Jee, Myung Hwan Yun (2016). "An anthropometric survey of Korean hand and hand shape types". International Journal of Industrial Ergonomics. 53: 10-18. ISSN 0169-8141. doi: 10.1016/j.ergon.2015.10.004
- ↵ Çakıt, Erman; Durgun, Behice; Cetik, Mevhibe; Yoldaş, Oguz (2014). "A Survey of Hand Anthropometry and Biomechanical Measurements of Dentistry Students in Turkey". Human Factors and Ergonomics in Manufacturing & Service Industries. 24: 739-753. doi: 10.1002/hfm.20401
- ↵ Bures, Marek; Görner, Tomas; Sediva, Blanka (2015). "Hand anthropometry of Czech population". Conference: 2015 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM). 1077-1082. doi: 10.1109/IEEM.2015.7385814
- ↵b↵ Švábová, Petral Masnicová, Radoslav; Obertová, Zuzana; Kramárová, Daniela; Kyselicová, Klaudia; Dornhoferova, Michaela; Bodorikova, Silvia; Neščáková, Eva (2014). "Estimation of stature using hand and foot dimensions in Slovak adults". Legal Medicine. 17. doi: 10.1016/j.legalmed.2014.10.005
- ↵ Shim, Jae Kun; Oliveira, Marcio; Hsu, Jeffrey; Huang, Junfeng; Park, Jaebum; Clark, Jane (2007). "Hand digit control in children: Age-related changes in hand digit force interactions during maximum flexion and extension force production tasks." Experimental brain research. 176(2): 374-86. doi: 10.1007/s00221-006-0629-x. Full text available on ResearchGate.
- ↵ Man-Systems Integration Standards, Volume I, Section 3 (Anthropometry and biomechanics. National Aeronautics and Space Administration. Revision B, July 1995.

I find this quite interesting. Were you able to expand your research on this onto digits and thumb anthropometric studies?
ReplyDeleteThanks for the comment. I didn't go further with this because my objective was to figure out the dimensions needed for an ergonimic handle, and the overall size of the hand is the main concern for that application. I did recently add a section called "Additional data (2 years later)" above with information about American hand sizes, which for some reason I couldn't find when I conducted this study.
DeleteI see. Is your business based in California? What's the best way to contact you in regards to a design idea?
DeleteYes, I'm in California, on the SF Bay Area penninsula. Best way to contact me is email. My email address is in the first paragraph of https://www.nablu.com/p/3d-printing.html
Deleteinteresting
ReplyDeleteI was needing average hand sizes for a product i’m creating, this article was quite helpful. Thank you.
ReplyDeleteI noticed there were no stats on Africans and/or African or of the African Diaspora cited here?
ReplyDeleteThat's because I found no data on Africans specifically. If you have any sources, I'm happy to include them.
Delete